Friday 4/25
Matt tested the GPS and compass making the final adjustments to offsets and other key values. He then soldered a relay to the gun so it would release projectiles when a signal was given. Matt and Patrick then tested the airsoft gun to make sure it would fire. It didn't. This is because EMF spikes were occurring, the gun had plastic shavings from the cuts, and the four 1.5V rechargeable batteries we were using couldn't provide enough power to the gun motor. At first we swapped the airsoft gun with the nerf gun. The same problems were still present. To fix this we decided to use another battery. The nerf gun was too heavy so we switched back to the airsoft gun after Patrick used compressed air to clean it.
Mike spliced wires for the master switch ad soldered them together to make the LED only turn on when the switch is on. He also soldered wires to each guns. With help from Matt, he then soldered wires to the relay. He prepared the nerf gun to act as a backup just in case the airsoft gun didn't work. He then helped Patrick label.
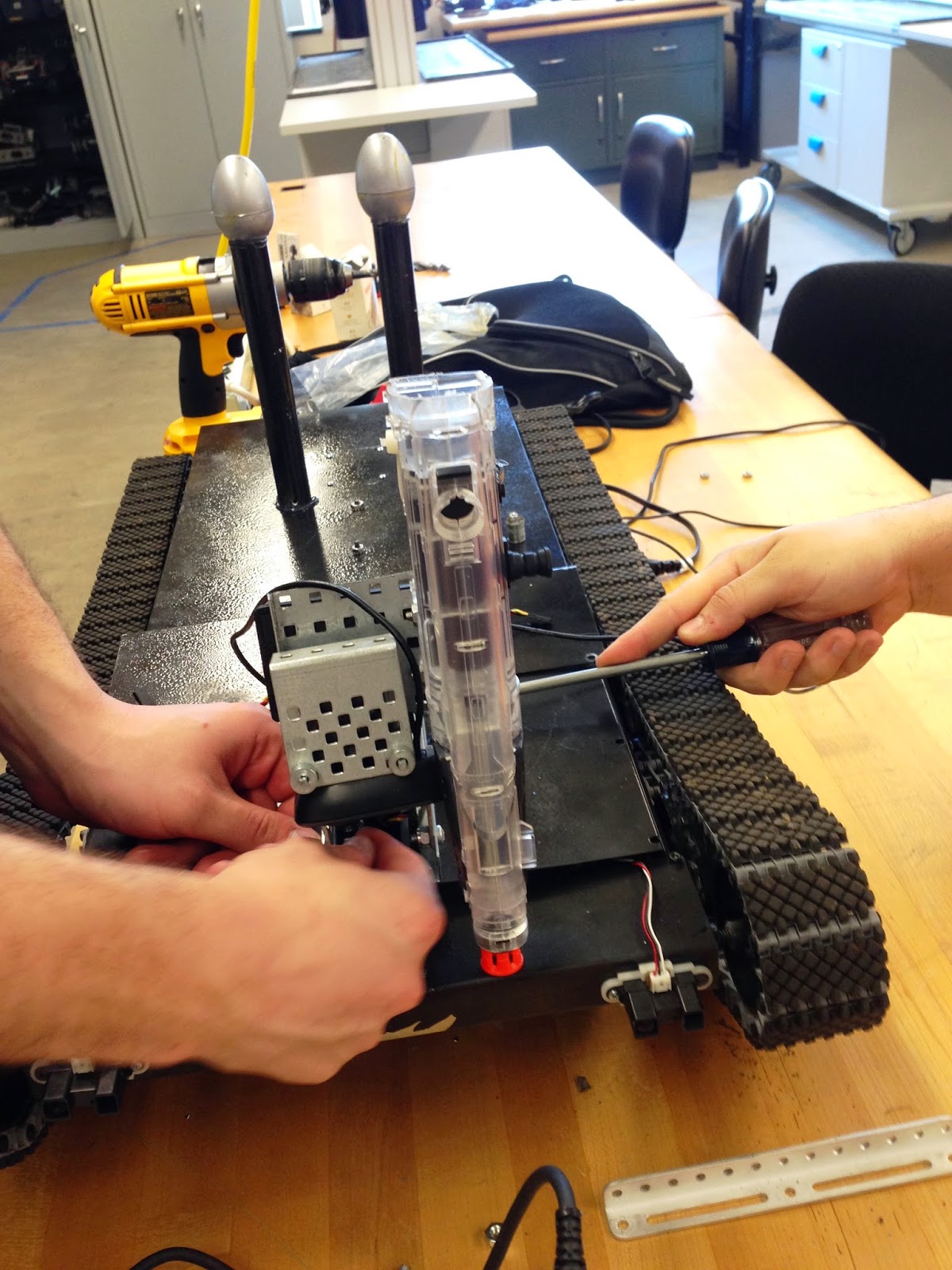
I, Patrick, made labels for the various electrical components including the on/off of the master switch, X/Y axises of the gimbal, GPS/gimbal boards, and the 5V/ground rail. After Matt discovered the gun battery need to be switched, I took off the old ones, and mounted my 7.2V NiMH using zip ties.
After we felt everything was wired properly and where it needed to be, Matt and Patrick cleaned up the wiring. We tested the final program outside. Matt, Patrick, and a student off the street volunteered to have projectiles from the immobilization device launched at them.
+Part+1.JPG) |
| New Gimbal and RC Camera |
 |
| Shela Moving Towards Helsel |
+Part+4.JPG) |
| Labels for Electrical Parts |
+Part+5.JPG) |
| Initial Labels for Switch and Gmibal |
+Part+6.JPG) |
| Mike Testing Airsoft Gun |
+Part+7.JPG) |
| Brains Labeled |
 |
| Nerf Gun Firing Test |
+Part+9.JPG) |
| New Battery for Gun, BBs Loaded |
 |
| Shela's Test Victim: Patrick |
 |
| Shela Firing Gun W/ Warning Light |
 |
| Shela Patrolling Eberly |
 |
| Shela Patrolling Eberly Part 2 |
+Part+17.JPG) |
| Shela 2.0 Front View |
 |
| Shela 2.0 Rear View |
 |
| Shela 2.0 Side View |
 |
| Shela 2.0 Isometric View (Left) |
 |
| Shela 2.0 Isometric View (Right) |
+Part+1.JPG)
+Part+2.JPG)
+Part+3.JPG)
+Part+4.JPG)
+Part+5.JPG)
+Part+1.JPG)
+Part+2.JPG)
+Part+3.JPG)
+Part+4.JPG)
+Part+5.JPG)
+Part+1.JPG)
+Part+2.JPG)
+Part+3.JPG)
+Part+1.JPG)
+Part+2.JPG)
+Part+3.JPG)
+Part+1.JPG)
+Part+2.JPG)
+Part+3.JPG)
+Part+4.JPG)

















