Friday 3/7
We all helped modify the chassis in one way or another. Matt and Mike moved the front motors as close the front edge of the chassis as possible. This was necessary because the first the time the robot tried to mount the curb, the front of the robot was getting caught on the robot. We also had to have pictures taken for the school 's robotic website so we did simple things like have the robot move, wire the motors, and remount the motors.
Matt tested the GPS and robot with help from Patrick and Mike. After modifying the chassis a bit, the robot climbed curbs with ease. The locomotion testing involved Matt using RC (the keyboard) to control the robot. An issue we were having was the batteries weren't lasting very long. To account for this, we used various batteries and Patrick bought a brand new battery. For the GPS testing, the robot "brains" (Arduino boards. Xbee, and GPS) were left off the robot so someone could easily walk around campus acting as the robot. The GPS testing involved Matt sending the brains a destination and Patrick moving around to see what the robot's heading and location was in relation to the destination.
Mike disassembled the nerf gun to make the the nerf gun as small as possible since all we need from the gun are the dart holder and firing mechanism with motors. An issue we were having in earlier class periods was the treads were either too tight or too loose. To account for this, Mike was going to add another set of cogs on each side so that they would tight but have some slack in them. After testing the robot's movement outside, we realized the extra cogs weren't necessary and having more slack actually helped the robot mount curbs easier.
I, Patrick, moved the cogs at the top of the robot down one hole to give the robot treads some slack. Eventually these were moved forward as previously mentioned. I then helped Matt and Mike modify the chassis even more and test the robot. I finalized the new chassis design with help from Dr. B. It will use a metal shelf roughly 11" wide by roughly 2-3ft long. It is a little narrower than our current chassis but we will have a stronger and more stable chassis as the tradeoff. Since the bottom is a shelf, it will have a solid bottom that can be used to mount parts. This new chassis will use siderails and metal rods similar to Project Palmer's chassis.
+Part+1.JPG) |
| Motor Mount Modification |
+Part+2.JPG) |
| Temporary Sabertooth Mount For Testing |
+Part+3.JPG) |
| Shela vs. Mike (Size) |
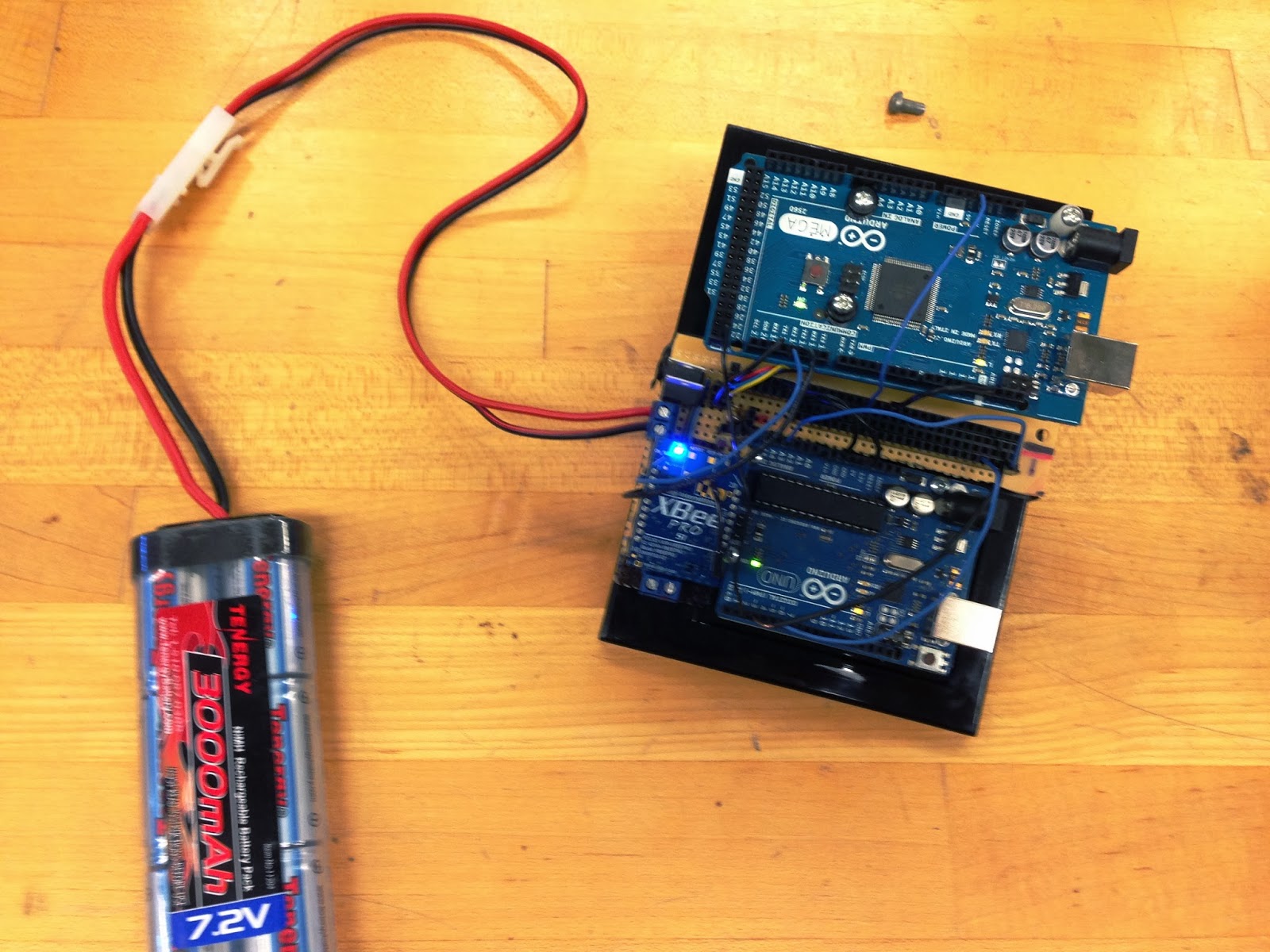+Part+6.JPG) |
| Brains Platform (Using 7.2V NiMH) |
+Part+7.JPG) |
| Disassembled Nerf Gun |
 |
| Shela Locomotion Testing |
 |
| More Testing |
+Part+4.JPG) |
| Shela 1.0 |
+Part+8.jpg) |
Shela 1.5
Unfortunately due to dead batteries, I did not get a video of the robot mounting the curb.
|
No comments:
Post a Comment